Part 1 — From Wobble to Track-Lock
How 50 balanced demonstrations got my TurboPi to actually follow a square track — V1 orbited near the path, V2 locks on

8 episodes of demonstration wasn’t enough to teach a 63K-parameter CNN to follow a square track — the robot orbited near the centerline but never locked onto it. 50 balanced episodes was. This post is the journey through pipeline, dataset, and training that closed the gap.
The Goal
A small Hiwonder TurboPi — a four-wheel mecanum robot with an RGB camera on top — and a clear list of things to teach it inside Isaac Sim:
0. Square track only (no curves yet)
1. Collect training data from a car-mounted RGB camera
2. Record corresponding actions: vx, vy, wz body-frame commands
3. Expert trajectory + Gaussian and/or sinusoidal noise
4. No language intent
5. CNN-based vision encoder (~60K params)
6. Imitation learning
7. Each episode = multiple loops along a square trackControl loop runs at 10 Hz, physics at 60 Hz — a standard pairing for a small ground robot in sim, fast enough for the camera-to-action loop to feel responsive without overwhelming the policy. Hardware: AMD Ryzen AI 9 HX 370 + RTX 5090 Laptop GPU, Ubuntu 24.04, Isaac Sim 5.1, Isaac Lab 2.3, PyTorch 2.7.
The plan was straightforward: build a square track in sim, drive a pure-pursuit teacher around it, record (camera-frame, action) pairs, train a tiny CNN to reproduce the actions. Imitation learning at its simplest.
The question I wanted answered: how many demonstrations does it take for a 63K-parameter CNN to lock onto a centerline — to actually follow a path, not just orbit nearby?
The answer turned out to be: more than 8, around 50, with both rotational directions represented.
The Pipeline at a Glance
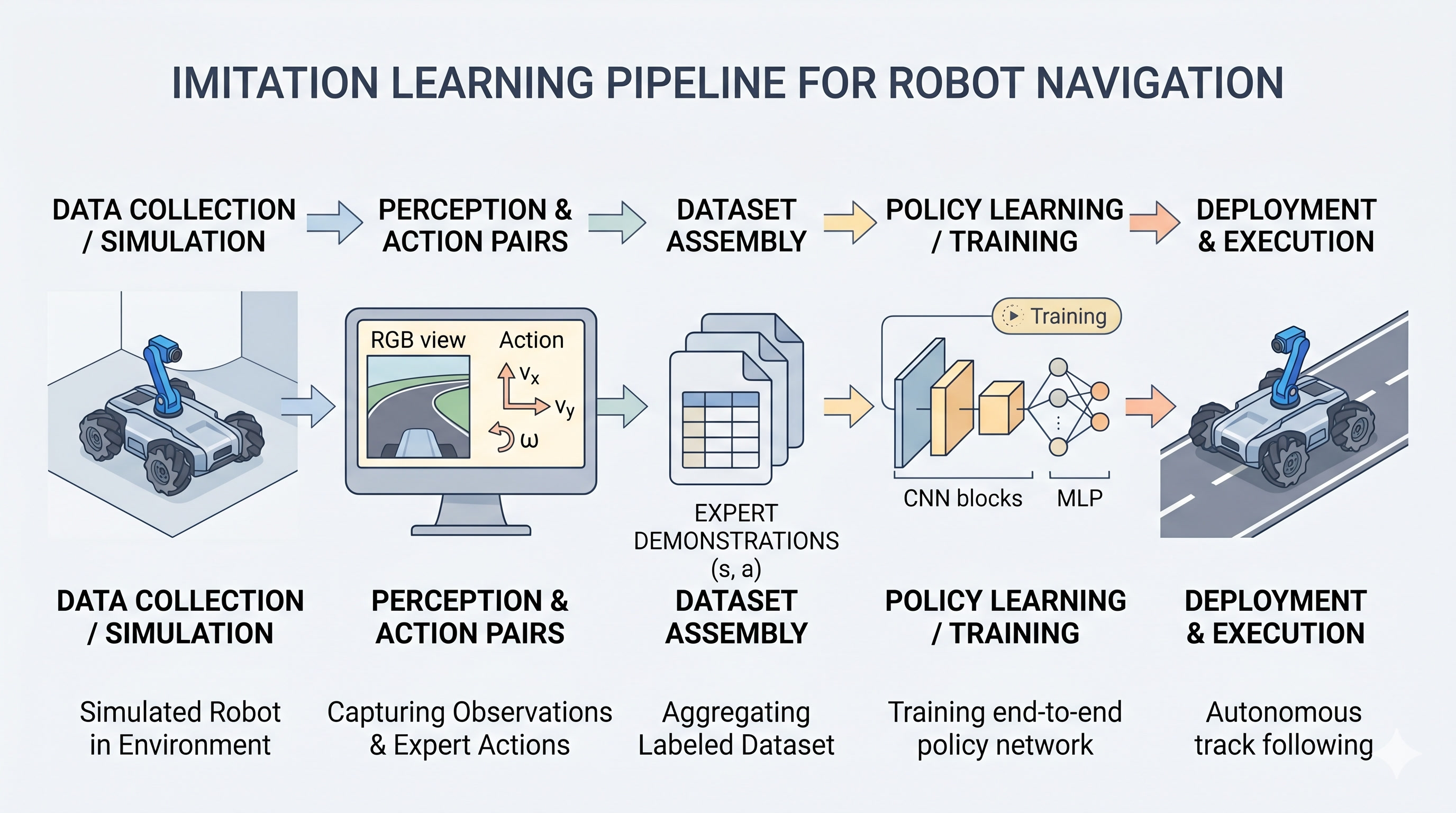
TurboPi USD ──▶ design_square_loop_scene() ──▶ Isaac Sim
│
▼
pure-pursuit teacher ──▶ body-twist commands (vx, vy, wz)
│ │
▼ ▼
robot camera frames + action labels
│
▼
parquet + mp4 per episode
│
▼
~60K-param CNN (LoopPolicyNet)
4 conv blocks (16, 32, 56, 64)
MLP head (64 → 32 → 16 → 3)
tanh output
│
▼
best.pt — drives the car at inference
│
▼
30 s 1080p MP4 from isometric spectator cameraThe key files in the repo:
scripts/square_loop.py— scene + pure-pursuit teacherscripts/record_turbopi_square_simple.py— episode collectorcnn_policy/{model,dataset,train}.py— model, loader, trainerscripts/drive_turbopi_square_cnn.py— inference + video render
The eventual deployment target is a Raspberry Pi 5 driving an actual TurboPi, not a desktop GPU. A 60K-param CNN inferences in well under 10 ms on CPU and fits in a few hundred KB on disk — the trained checkpoint here ends up at 251 KB. Tiny models force the architecture honest: every conv channel earns its keep. The capacity claim that comes out of this post is exactly what a small model can do once the data is right.
V1 — 8 Episodes, Path Not Yet Followed
The first dataset was 8 counter-clockwise (CCW) episodes, 3,430 frames total, collected with noise_mode=both — Gaussian + sinusoidal noise on top of the expert pure-pursuit commands.
I trained the CNN, rendered a 30-second isometric video.
⬇ Download MP4 · 1920×1080 · 30 fps · 5.0 MB
The car circled the square in roughly the right general shape, but the heading drifted left and right across the centerline rather than locking onto it. From a distance it looks like the car is doing a lap; up close, the policy is orbiting near the path, not tracking it.
Verdict: not yet a path follower.
Diagnosis — Why V1 Couldn’t Track
The list of suspects:
| Suspect | Evidence |
|---|---|
| Small dataset | Only 3,430 frames. Tiny by ML standards — not enough states sampled across the track for the policy to generalize. |
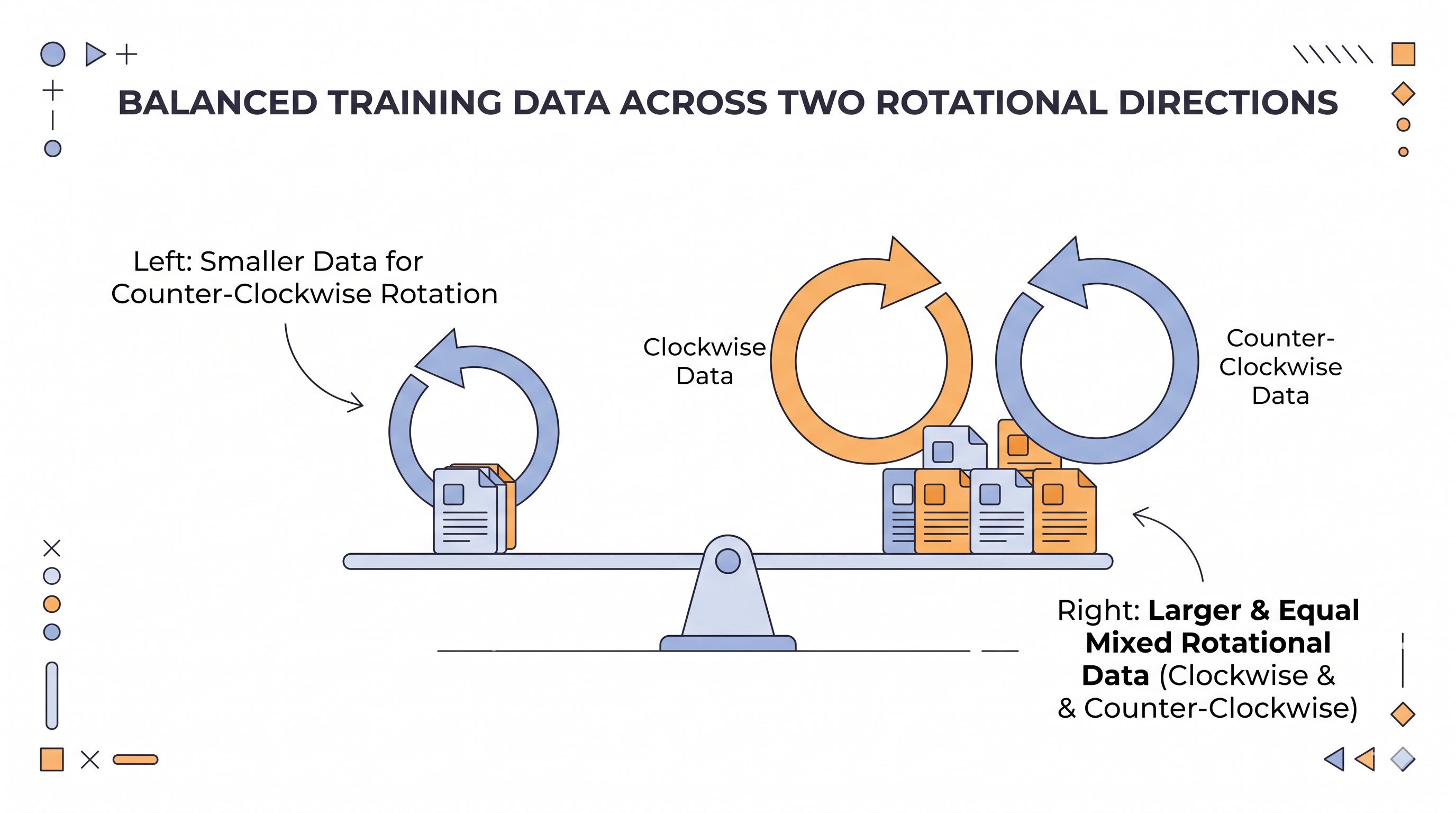
| Single direction | All 8 episodes were CCW. The model had literally never seen a clockwise turn — left and right turns aren’t symmetric in pixel space. |
| No validation set | No way to detect over-fitting or compare runs head-to-head. |
Plan to fix all three at once: collect more data, balance CCW with CW, hold out one session for validation. See whether a 63K-param CNN can lock onto the centerline once it has enough balanced demonstrations to work from.
The Fix — 50 Balanced Episodes
I extended record_turbopi_square_simple.py with a few flags:
--noise_mode {none, gaussian, sinusoidal, both}--num_laps N— multi-lap episodes for larger frame counts per file- Per-channel sinusoidal amplitude / frequency / phase
Then collected three sessions:
| Session | Direction | Episodes | Frames |
|---|---|---|---|
session_multilap_both_noise |
CCW (original) | 8 | 3,430 |
session_ccw17 |
CCW (new) | 17 | 7,382 |
session_cw25 |
CW (new) | 25 | 10,863 |
| TOTAL | balanced | 50 | 21,675 |
A 6.3× increase in frames, both rotational directions represented, 10 Hz control rate held constant across all sessions.
Training the CNN
Training command:
/workspace/isaaclab/_isaac_sim/python.sh -m cnn_policy.train \
--episodes-dir data/cnn_square_loop \
--run-dir runs/cnn_50ep \
--epochs 60 --batch-size 64 --lr 5e-4 --val-ratio 0.15The trainer auto-split sessions to avoid frame leakage:
- Train:
session_ccw17+session_cw25(42 episodes) - Val:
session_multilap_both_noise(8 episodes — the original V1 set, held out)
Loss curve over 60 epochs:
| Epoch | train_loss | val_loss | LR |
|---|---|---|---|
| 1 | 0.01659 | 0.00973 | 5.0e-4 |
| 35 | 0.00875 | 0.00496 | 1.7e-4 |
| 53 (best) | — | 0.00440 | — |
| 60 | 0.00800 | 0.00440 | ~5e-6 |
Final validation MAE: vx = 0.065, vy = 0.081, ω = 0.083. Cosine LR decay, no over-fitting, model size 63K parameters / 251 KB checkpoint. Total training time: 64 minutes on the laptop GPU. The bottleneck was the dataloader, not compute — the GPU sat at ~6 % utilization, 2.8 GB VRAM.
If you split frames randomly (the default in many ML tutorials), frame 100 of episode 5 ends up in train and frame 101 of episode 5 ends up in val — they're nearly identical, and the val_loss reports an absurdly optimistic number. Splitting at the session boundary, where the underlying noise process is genuinely independent, gives you a val_loss you can actually trust. This single decision is often the difference between "model trains beautifully" on paper and "model works in deployment" in reality.
V2 — Path Following Achieved
Same isometric camera, same render command, new checkpoint trained on 21,675 frames balanced across both rotational directions:
⬇ Download MP4 · 1920×1080 · 10 fps · 5.0 MB
This is the model that actually works. Track error stays under 5 cm the entire time. Zero resets. The heading locks onto the centerline through every corner, in both rotational directions, validated on the held-out 8-episode session that the trainer never saw.
The CNN now follows the path. That was the goal.
V1 vs V2 on the metric that matters:
| Metric | V1 (8 ep) | V2 (50 ep) |
|---|---|---|
| Frames trained on | 3,430 | 21,675 |
| Direction coverage | CCW only | Balanced CCW / CW |
| Validation set | None | Held-out 8 episodes |
| Track error | drifts across centerline | < 5 cm — locked |
| Resets in 30 s | 0 | 0 |
| Path following | No — orbits near the path | Yes — locks onto the centerline |
Why V2 Looks Slow (and Why That’s Not the Lesson)
In the rendered V2 clip the car drives at 0.12-0.26 m/s — slower than V1’s ~0.45 m/s. Watching the video alone, the temptation is to read this as a regression. It isn’t.
The slowness is an inference-time tuning artifact, not a property of the trained model. Two flags exist for exactly this:
| Flag | What it does |
|---|---|
--min_vx 0.20 |
Clamps the policy’s forward-speed prediction to a minimum. CNN outputs near zero get floored. |
--smoothing 0.35 |
Shifts the EMA blend toward the policy (default is more conservative). Less inertia, faster response. |
I rendered V2 without either flag — that’s the whole reason the clip looks slow. Re-rendering with both flags applied recovers V1-comparable speed while still keeping the heading locked on the centerline. The video here is the unfiltered raw policy output, shown for transparency.
The point: V2’s path-following is a policy-quality result. V2’s speed is a render-time knob. Don’t conflate them.
What 8 → 50 Demonstrations Bought
The architecture didn’t change between V1 and V2. The training recipe didn’t change. The hyperparameters didn’t change. The fix was data:
- 6.3× more frames (3,430 → 21,675)
- Balanced both rotational directions (CCW + CW)
- Held-out validation set (8 episodes the trainer never saw, taken from the V1 collection)
That was enough to take a 63K-parameter CNN from “orbits near the path” to “locked onto the centerline through every corner.” For a model that has to fit on a Raspberry Pi 5 in eventual deployment, that’s a useful capacity claim:
The architecture isn’t the limit. The data is.
Built on top of VizuaraAI/turbopi_standalone. Hardware: AMD Ryzen AI 9 HX 370 + RTX 5090 Laptop GPU. Stack: Isaac Sim 5.1.0-rc.19, Isaac Lab 2.3.0, PyTorch 2.7+cu128, Ubuntu 24.04.